












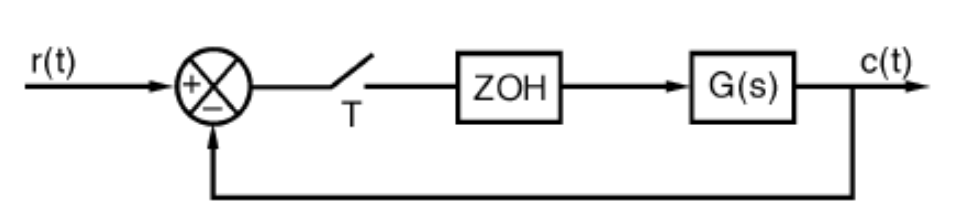
Cho hệ thống điều khiển rời rạc có sơ đồ khối như hình vẽ:
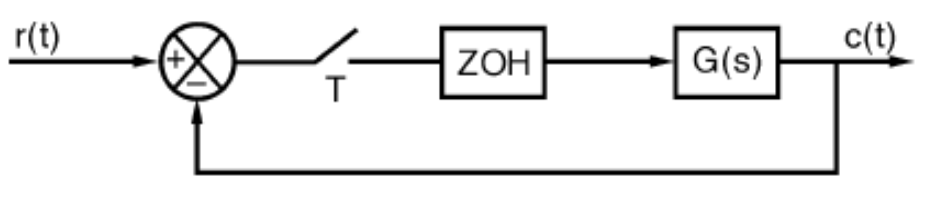
Với G(s) = \(\frac{10}{(s+2)(s+3)}\); chu kỳ lấy mẫu Ts = 0.1(s). Độ vọt lố là: trang 290 LTĐK
A. POT = 32.69 %
B. POT = 15.32 %
C. POT = 45.18 %
D. POT = 23.24 %
Câu hỏi trong đề: 200+ câu Trắc nghiệm Điều khiển số có đáp án !!
Quảng cáo
Trả lời:
Chọn đáp án A.
Hot: 1000+ Đề thi cuối kì 2 file word cấu trúc mới 2026 Toán, Văn, Anh... lớp 1-12 (chỉ từ 60k). Tải ngay
CÂU HỎI HOT CÙNG CHỦ ĐỀ
Câu 1
Hàm bước nhảy đơn vị 1(t)
Hàm Dirac
Hàm bậc thang
Hàm mũ
Lời giải
Chọn đáp án A.
Câu 2
A. exl = 0.376
B. exl = 0
C. exl = 0.6
D. exl = 76
Lời giải
Chọn đáp án A.
Câu 3
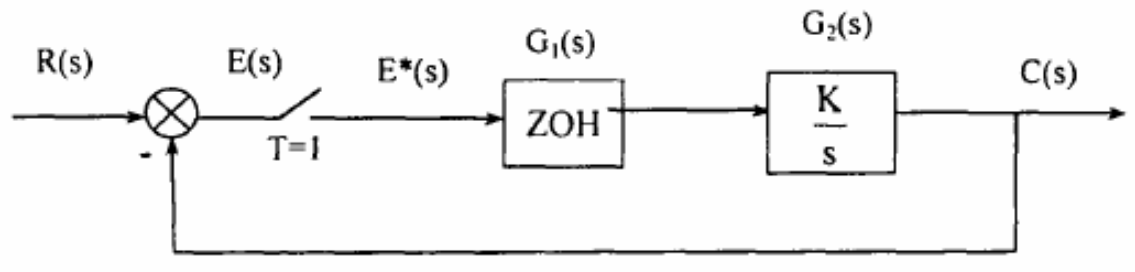 Khi K = 1 hệ thống có ổn định không?
Khi K = 1 hệ thống có ổn định không?Hệ thống ổn định
Hệ thống không ổn định
A, B đúng
A, B sai
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Câu 4
2
3
4
5
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Câu 5
A. \({t}_{qđ}=15\)
B. \({t}_{qđ}=10\)
C. \({t}_{qđ}=5\)
D. \({t}_{qđ}=1.5\)
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Câu 6
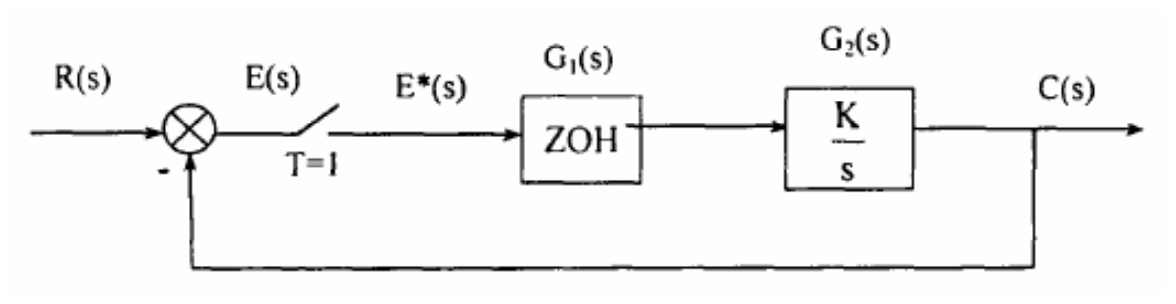 Khi K = 3 hệ thống có ổn định không?
Khi K = 3 hệ thống có ổn định không?Hệ thống ổn định
Hệ thống không ổn định
Hệ thống liên tục
Hệ thống bất biến
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.