












Một khu bảo tồn thiên nhiên có hai trạm kiểm lâm và một trạm quan sát. Trong hệ toạ độ \(Oxyz\) (đơn vị độ dài trên mỗi trục là kilômét), hai trạm kiểm lâm và trạm quan sát có vị trí lần lượt là \(A\left( {10;5;0} \right)\), \(B\left( {70;85;0} \right)\) và \(I\left( {20;65;0,2} \right)\). Một thiết bị bay không người lái (drone) được thiết kế bay trên đường thẳng đi qua hai điểm \(C\left( {10;5;0,1} \right)\) và \(D\left( {70;85;0,1} \right)\) để truyền tín hiệu và dữ liệu về trạm quan sát \(I\).
(a)Khi tín hiệu gửi về trạm quan sát nhanh nhất thì vị trí của drone là \[K\left( {\frac{{212}}{5};\frac{{241}}{5};0,1} \right)\].
(b)Cùng một thời điểm, một xe máy xuất phát từ \(A\) đi đến \(B\) với vận tốc \(40\)km/h và một ô tô xuất phát từ \(B\) đi đến \(A\) với vận tốc \(60\)km/h, sau đó gặp nhau tại \(M\). Drone phải di chuyển trước đến vị trí \(H\) có hình chiếu trên \[AB\] là \(M\)để truyền dữ liệu về trạm quan sát \(I\). Khi đó vị trí của drone là \[\left( {34;37;0,1} \right)\].
(c)Trạm quan sát \(I\) nhìn đoạn thẳng \(AB\) dưới một góc nhỏ hơn \(65^\circ \).
(d)Phương trình đường thẳng mô tả cho tuyến đường bay của drone là \(\left\{ {\begin{array}{*{20}{l}}{x = 10 + 3t}\\{y = 5 + 4t}\\{z = 0,1}\end{array}} \right.\left( {t \in \mathbb{R}} \right)\).
Câu hỏi trong đề: Bài tập ôn tập Toán 12 Cánh diều Chương 5 có đáp án !!
Quảng cáo
Trả lời:
a) Đúng. \(\overrightarrow {CD} = \left( {60;80;0} \right) = 20.\left( {3;4;0} \right)\).
Phương trình đường thẳng \(CD:\left\{ \begin{array}{l}x = 10 + 3t\\y = 5 + 4t\\z = 0,1\end{array} \right.\left( {t \in \mathbb{R}} \right)\).
Gọi \[K\] là hình chiếu của \(I\) lên đường thẳng \(CD\).
Ta có: \[K\left( {10 + 3t;5 + 4t;0,1} \right) \in CD\]
\(\overrightarrow {IK} = \left( {3t - 10;4t - 60; - 0,1} \right)\)
\(\overrightarrow {CD} \overrightarrow {.IK} = 0 \Leftrightarrow t = \frac{{54}}{5}\) nên \[K\left( {\frac{{212}}{5};\frac{{241}}{5};0,1} \right)\].
Vậy khi tín hiệu gửi về trạm quan sát nhanh nhất thì \(K\) là hình chiếu của \(I\) lên \(CD\) nên \[K\left( {\frac{{212}}{5};\frac{{241}}{5};0,1} \right)\].
b) Đúng. Ta có \(\overrightarrow {AB} = \left( {60;80;0} \right)\)\( \Rightarrow AB = 100\left( {{\rm{km}}} \right)\).
Gọi \(h\) (giờ) là thời gian hai xe xuất phát đến lúc gặp nhau.
Ta có \(40h + 60h = 100\)\( \Leftrightarrow h = 1\) (giờ).
Quảng đường \(AM = 40\,\left( {{\rm{km}}} \right)\) nên \(\overrightarrow {AM} = \frac{2}{5}\overrightarrow {AB} \) suy ra \(M\left( {34;37;0} \right)\).
\[H\left( {10 + 3t;5 + 4t;0,1} \right) \in CD\] và \(\overrightarrow {MH} = \left( {3t - 24;4t - 32;0,1} \right)\).
Do \(M\) là hình chiếu của \(H\) trên \(AB\) nên \(\overrightarrow {MH} .\overrightarrow {AB} = 0 \Leftrightarrow t = 8\).
Vậy \[H\left( {34;37;0,1} \right)\].
c) Sai. Ta có \(AB = 100\), \(IA = \frac{{\sqrt {92501} }}{5}\), \(IB = \frac{{\sqrt {72501} }}{5}\).
Xét tam giác \(IAB\) có: \(\cos \widehat {AIB} = \frac{{I{A^2} + I{B^2} - A{B^2}}}{{2.IA.IB}} \approx - 0,51896\) nên \(\widehat {AIB} \approx 121^\circ \).
d) Đúng. \(\overrightarrow {CD} = \left( {60;80;0} \right) = 20\left( {3;4;0} \right)\).
Phương trình đường thẳng \(CD:\left\{ \begin{array}{l}x = 10 + 3t\\y = 5 + 4t\\z = 0,1\end{array} \right.\left( {t \in \mathbb{R}} \right)\).
Nên phương trình đường thẳng mô tả cho tuyến đường bay của drone là \(\left\{ {\begin{array}{*{20}{l}}{x = 10 + 3t}\\{y = 5 + 4t}\\{z = 0,1}\end{array}} \right.\left( {t \in \mathbb{R}} \right)\).
Hot: 1000+ Đề thi cuối kì 2 file word cấu trúc mới 2026 Toán, Văn, Anh... lớp 1-12 (chỉ từ 60k). Tải ngay
CÂU HỎI HOT CÙNG CHỦ ĐỀ
Lời giải
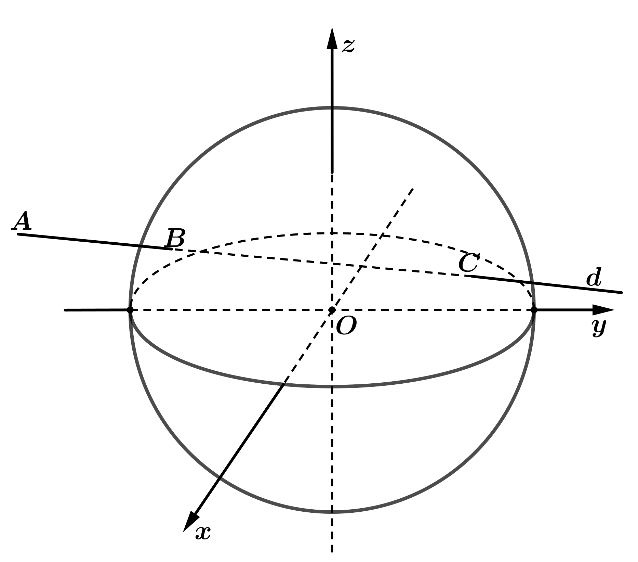
a) Sai. Vì đài kiểm soát không lưu của một sân bay ở vị trí \(O\left( {0;0;0} \right)\) và được thiết kế phát hiện máy bay ở khoảng cách tối đa \(600\)km nên ranh giới vùng phát sóng của đài kiểm soát không lưu trong không gian là mặt cầu có bán kính bằng \(600\)km.
b) Đúng. Ranh giới vùng phát sóng của đài kiểm soát không lưu trong không gian là mặt cầu tâm \(O\left( {0\,;\,0\,;\,0} \right)\) có bán kính bằng \(R = 600\,\)có phương trình là: \({x^2} + {y^2} + {z^2} = 360000\).
c) Đúng. Ta có \(OM = \sqrt {{{\left( { - 500} \right)}^2} + {{\left( {100} \right)}^2} + {{\left( {100\sqrt {11} } \right)}^2}} \approx 608 > 600 = R\).
Vậy, tại vị trí điểm \(M\left( { - 500\,;\,100\,;\,100\sqrt {11} } \right)\) máy bay nằm ngoài vùng kiểm soát không không lưu của đài kiểm soát không lưu sân bay.
d) Sai. Thay \[d:\left\{ \begin{array}{l}x = - 1000 + 100t\\y = - 300 + 80t\\z = 100\sqrt {11} \end{array} \right.\left( {t \in \mathbb{R}} \right)\] vào phương trình mặt cầu \({x^2} + {y^2} + {z^2} = 360000\):
\(\begin{array}{l}{\left( {100t - 1000} \right)^2} + {\left( {80t - 300} \right)^2} + {\left( {100\sqrt {11} } \right)^2} = 360000\\ \Leftrightarrow 164{t^2} - 2480t + 8400 = 0 \Leftrightarrow \left[ \begin{array}{l}t = 10 \Rightarrow B\left( {0\,;\,500\,;\,100\sqrt {11} } \right)\\t = \frac{{210}}{{41}} \Rightarrow C\left( { - \frac{{20000}}{{41}}\,;\,\frac{{4500}}{{41}}\,;\,100\sqrt {11} } \right)\end{array} \right.\end{array}\)
Quãng đường máy bay di chuyển trong vùng kiểm soát không lưu là:
\(BC = \sqrt {{{\left( { - \frac{{20000}}{{41}}} \right)}^2} + {{\left( {\frac{{4500}}{{41}} - 500} \right)}^2} + {{\left( {100\sqrt {11} - 100\sqrt {11} } \right)}^2}} \approx 625\,\)km.
Vậy thời gian máy bay di chuyển theo đường thẳng \(d\) và trong phạm vi kiểm soát không lưu của sân bay là: \(\frac{{625}}{{900}} = \frac{{25}}{{36}}\) giờ.
Lời giải
Đáp án:
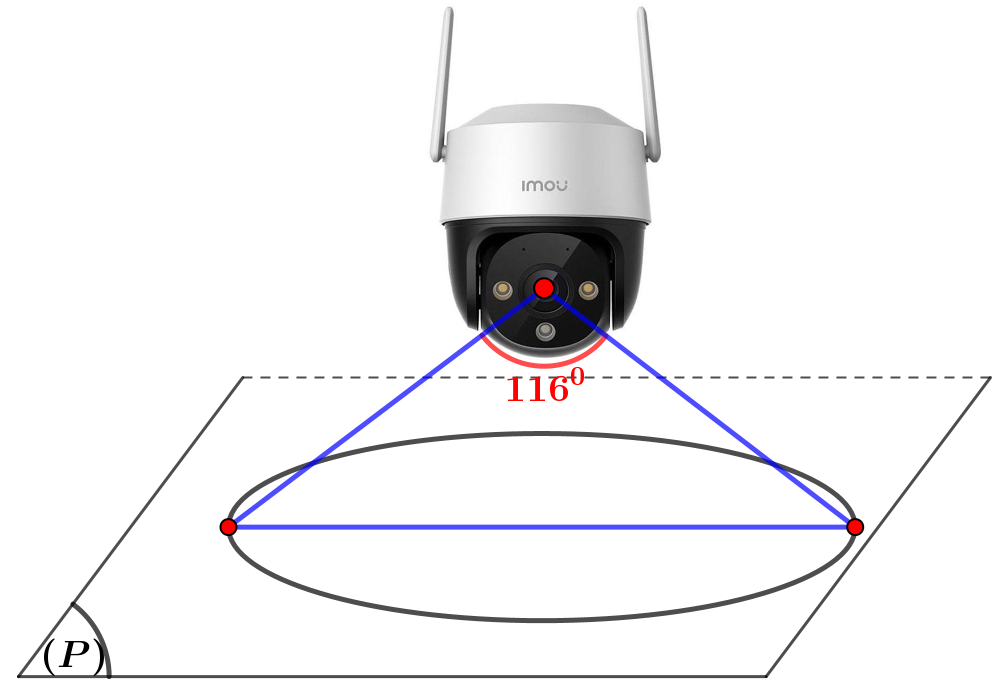
Gọi \(A,B,C\) là các điểm như hình vẽ bên dưới và \(H\) là hình chiếu vuông góc của \(A\) lên mặt phẳng \(\left( P \right)\).
Hình vẽ minh hoạ
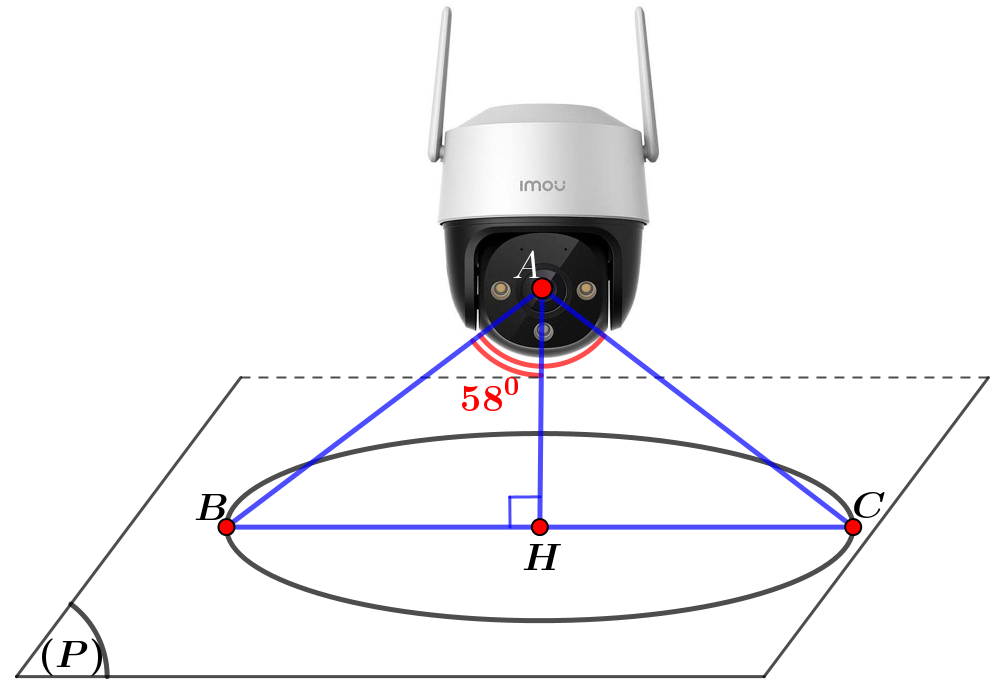
Theo đề \(\widehat {BAC} = 116^\circ \Rightarrow \widehat {BAH} = 58^\circ \). Khi đó \(AH = {\rm{d}}\left( {A,\left( P \right)} \right) = \frac{{\left| {2 \cdot 2 - 1 - 2 \cdot 5 + 13} \right|}}{{\sqrt {4 + 1 + 4} }} = 2\) (đvđd).
Xét tam giác \(ABH\) vuông tại \(H\), ta có: \(\tan \widehat {BAH} = \frac{{BH}}{{AH}} \Rightarrow BH = \tan 58^\circ \cdot 2 = 2\tan 58^\circ \) (đvđd).
Suy ra \(BC = 2BH = 2 \cdot 2\tan 58^\circ \approx 6,4\)(đvđd).
Vậy vùng quan sát của camera trên mặt phẳng \(\left( P \right)\) là hình tròn có đường kính khoảng \(6,4\) (đvđd).
Đáp án: 6,4.

Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.

Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.