












Hệ thống định vị toàn cầu (tên tiếng Anh là: Global Positioning System, viết tắt là GPS) là một hệ thống cho phép xác định chính xác vị trí của một vật thể trong không gian (Hình 42).
Ta có thể mô phỏng cơ chế hoạt động của hệ thống GPS trong không gian như sau: Trong cùng một thời điểm, toạ độ của một điểm \(M\) trong không gian sẽ được xác định bởi bốn vệ tinh cho trước, trên mỗi vệ tinh có một máy thu tín hiệu. Bằng cách so sánh sự sai lệch về thời gian từ lúc tín hiệu được phát đi vối thời gian nhận phản hồi tín hiệu đó, mỗi máy thu tín hiệu xác định được khoảng cách từ vệ tinh đến vị trí \(M\) cần tìm toạ độ. Như vậy, điểm \(M\) là giao điểm của bốn mặt cầu vối tâm lần lượt là bốn vệ tinh đã cho.

Ta xét một ví dụ cụ thể như sau:
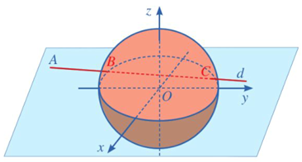
Trong không gian với hệ tọa độ Oxyz, cho bốn vệ tinh \(A(3; - 1;6),B(1;4;8)\), \(C(7;9;6),D(7; - 15;18)\). Tìm toạ độ của điểm \(M\) trong không gian biết khoảng cách từ các vệ tinh đến điểm \(M\) lần lượt là \(MA = 6,MB = 7,MC = 12,MD = 24\).
Hệ thống định vị toàn cầu (tên tiếng Anh là: Global Positioning System, viết tắt là GPS) là một hệ thống cho phép xác định chính xác vị trí của một vật thể trong không gian (Hình 42).
Ta có thể mô phỏng cơ chế hoạt động của hệ thống GPS trong không gian như sau: Trong cùng một thời điểm, toạ độ của một điểm \(M\) trong không gian sẽ được xác định bởi bốn vệ tinh cho trước, trên mỗi vệ tinh có một máy thu tín hiệu. Bằng cách so sánh sự sai lệch về thời gian từ lúc tín hiệu được phát đi vối thời gian nhận phản hồi tín hiệu đó, mỗi máy thu tín hiệu xác định được khoảng cách từ vệ tinh đến vị trí \(M\) cần tìm toạ độ. Như vậy, điểm \(M\) là giao điểm của bốn mặt cầu vối tâm lần lượt là bốn vệ tinh đã cho.
Ta xét một ví dụ cụ thể như sau:
Trong không gian với hệ tọa độ Oxyz, cho bốn vệ tinh \(A(3; - 1;6),B(1;4;8)\), \(C(7;9;6),D(7; - 15;18)\). Tìm toạ độ của điểm \(M\) trong không gian biết khoảng cách từ các vệ tinh đến điểm \(M\) lần lượt là \(MA = 6,MB = 7,MC = 12,MD = 24\).
Quảng cáo
Trả lời:
Gọi tọa độ điểm M là \({\rm{M}}({\rm{x}}\); y ; z) .
Ta có MA \( = \sqrt {{{(3 - x)}^2} + {{( - 1 - y)}^2} + {{(6 - z)}^2}} = 6\);
\(\begin{array}{l}{\rm{MB}} = \sqrt {{{(1 - x)}^2} + {{(4 - y)}^2} + {{(8 - z)}^2}} = 7;{\rm{MC}} = \sqrt {{{(7 - x)}^2} + {{(9 - y)}^2} + {{(6 - z)}^2}} = 12;\\{\rm{MD}} = \sqrt {{{(7 - x)}^2} + {{( - 15 - y)}^2} + {{(18 - z)}^2}} = 24.{\rm{ }}\end{array}\)
Ta có hệ phương trình \({\rm{ }}\left\{ {\begin{array}{*{20}{l}}{{{(3 - x)}^2} + {{( - 1 - y)}^2} + {{(6 - z)}^2} = 36}\\{{{(1 - x)}^2} + {{(4 - y)}^2} + {{(8 - z)}^2} = 49}\\{{{(7 - x)}^2} + {{(9 - y)}^2} + {{(6 - z)}^2} = 144}\\{{{(7 - x)}^2} + {{( - 15 - y)}^2} + {{(18 - z)}^2} = 576}\end{array}} \right.\)
Lấy (3) - (1) ta được: \({(7 - x)^2} - {(3 - x)^2} + {(9 - y)^2} - {( - 1 - y)^2} = 144 - 36\) \( \Leftrightarrow - 8{\rm{x}} - 20{\rm{y}} = - 12 \Leftrightarrow 2{\rm{x}} + 5{\rm{y}} = 3 \Leftrightarrow {\rm{x}} = \frac{{3 - 5y}}{2}\) (5).
Lấy (4) - (3) ta được: \({( - 15 - y)^2} - {(9 - y)^2} + {(18 - z)^2} - {(6 - z)^2} = 576 - 144\) \( \Leftrightarrow 48y - 24z = 0 \Leftrightarrow 2y - z = 0 \Leftrightarrow z = 2y{\rm{ }}(6)\).
Thay (5) và (6) vào (2) ta được: \({\left( {1 - \frac{{3 - 5y}}{2}} \right)^2} + {(4 - {\rm{y}})^2} + {(8 - 2{\rm{y}})^2} = 49\) \( \Leftrightarrow 45{y^2} - 170y + 125 = 0 \Leftrightarrow y = 1\) hoặc \(y = \frac{{25}}{9}\).
+ Với \(y = 1\) thì \(x = - 1,z = 2\). Khi đó \(M( - 1;1;2)\).
Thử lại bằng cách thay \(x = - 1,y = 1,z = 2\) vào các phương trình (1), (2), (3), (4) ta thấy thóa mãn. + Với \(y = \frac{{25}}{9}\) thì \(x = - \frac{{49}}{9},z = \frac{{50}}{9}\). Khi đó \({\rm{M}}\left( { - \frac{{49}}{9};\frac{{25}}{9};\frac{{50}}{9}} \right)\).
Thử lại bằng cách thay \(x = - \frac{{49}}{9},y = \frac{{25}}{9},z = \frac{{50}}{9}\) vào các phương trình (1), (2), (3), (4) ta thấy thỏa mãn. Vậy \({\rm{M}}( - 1;1;2)\) là điếm cằn tìm.
Hot: 1000+ Đề thi cuối kì 2 file word cấu trúc mới 2026 Toán, Văn, Anh... lớp 1-12 (chỉ từ 60k). Tải ngay
CÂU HỎI HOT CÙNG CHỦ ĐỀ
Lời giải
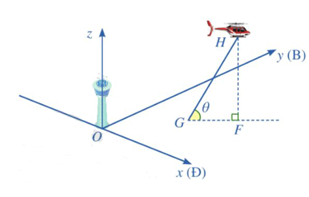
a) Phương trình tham số của đường thẳng d đi qua điểm \({\rm{A}}( - 688\); - 185; 8) và có vectơ chỉ phương \(\vec u = (91;75;0)\) là: \(\left\{ {\begin{array}{*{20}{l}}{x = - 688 + 91t}\\{y = - 185 + 75t{\rm{ (t là tham s?)}}{\rm{. }}}\\{z = 8}\end{array}} \right.\)
Gọi B là vị trí sớm nhất mà máy bay xuất hiện trên màn hình ra đa.
Vi B \(B\) d nên B(- 688 + 91t; - 185 + 75t; 8).
\(B\) là vị trí sớm nhất mà máy bay xuất hiện trên màn hình ra đa khi \({\rm{OB}} = 417\), tức là \(\sqrt {{{( - 688 + 91t)}^2} + {{( - 185 + 75t)}^2} + {8^2}} = 417\)\( \Leftrightarrow 13906{t^2} - 152966t + 333744 = 0\)\( \Leftrightarrow t = 3{\rm{ hay }}t = 8.{\rm{ }}\)
\( + {\rm{ Vì }} = 3,{\rm{ ta có }}B( - 415;40;8){\rm{. }}\)
+ Với \( = 3\), ta có \(B( - 415;40;8)\).
Khi đó \({\rm{AB}} = \sqrt {{{( - 415 + 688)}^2} + {{(40 + 185)}^2}} \approx 353,77\).
+ Với \({\rm{t}} = 8\), ta có \({\rm{B}}( - 88;415;8)\). Khi đó \(AB = \sqrt {{{( - 88 + 688)}^2} + {{(415 + 185)}^2}} \approx 848,53\).
Vi \(353,77 < 848,53\) nên tọa độ vị trí sớm nhất mà máy bay xuất hiện trên màn hình ra đa là \(( - 415;40;8)\).
b) Gọi H là vị trí mà máy bay bay gần đài kiểm soát không lưu nhất. Khi đó, khoảng OH phải ngắn nhất, điều này xảy ra khi và chỉ khi \({\rm{OH}} \bot {\rm{d}}\).
Vi H \( \in \) d nên \(H( - 688 + 91t\) '; - \(185 + 75\) t'; 8).
Ta có \(\overrightarrow {OH} = ( - 688 + 91t; - 185 + 75t;8)\).
\({\rm{OH}} \bot {\rm{d}} \Leftrightarrow \overrightarrow {OH} \bot \vec u \Leftrightarrow \overrightarrow {OH} \cdot \vec u = 0\)
\( \Leftrightarrow ( - 688 + 91t) \cdot 91 + ( - 185 + 75t) \cdot 75 + 8 \cdot 0 = 0\)
\( \Leftrightarrow 13906{{\rm{t}}^\prime } - 76483 = 0 \Leftrightarrow {{\rm{t}}^\prime } = \frac{{11}}{2}\). Suy ra H \(\left( { - \frac{{375}}{2};\frac{{455}}{2};8} \right)\).
Khoảng cách giữa máy bay và đài kiểm soát không lưu lúc đó là:
\({\rm{OH}} = \sqrt {{{\left( { - \frac{{375}}{2}} \right)}^2} + {{\left( {\frac{{455}}{2}} \right)}^2} + {8^2}} \approx 294,92(\;{\rm{km}}){\rm{. }}\)
c) Từ kết quả ở câu a), ta suy ra toạ độ của vị trí mà máy bay ra khỏi màn hình ra đa là \(( - 88;415;8)\).
Lời giải
a) Mặt cầu \((S)\) có phương trình
\({(x - 32)^2} + {(y - 50)^2} + {(z - 10)^2} = 109\)
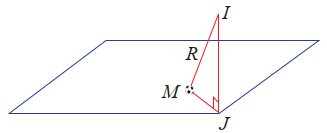
nên có tâm \(I(32;50;10)\) và bán kính \(R = \sqrt {109} \).
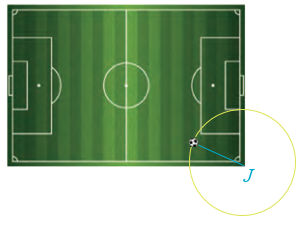
b) Trong không gian Oxyz, mặt sân có phương trình \(z = 0\) trùng với mặt phẳng tọa độ \((Oxy)\), suy ra hình chiếu vuông góc của điểm \(I(32;50;10)\) xuống mặt sân có toạ độ \(J(32;50;0)\).
c) Trong tam giác vuông IJM, ta có \(IJ = 10,IM = {\rm{R}}\), suy ra
\(JM = \sqrt {I{M^2} - I{J^2}} = \sqrt {109 - 100} = 3.\)
Vậy khoảng cách từ vị trí \(M\) của quả bóng đến điểm \(J\) là 3 m .

Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.

Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.

Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.

Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.