












Robot tránh vật cản như thế nào?
Đọc, thảo luận về nguyên tắc chung và cách lập trình điều khiển robot tránh vật cản.
Robot tránh vật cản như thế nào?
Đọc, thảo luận về nguyên tắc chung và cách lập trình điều khiển robot tránh vật cản.
Quảng cáo
Trả lời:
Các lệnh sử dụng cảm biến siêu âm để nhận biết và tránh vật cản của robot đều phải đặt trong nhóm lệnh lặp vô tận forever. Có một số trường hợp cụ thể của công việc điều khiển này:
(1) Điều khiển robot gặp vật cản thì dừng lại, có thể cho robot tiến sát đến vật cản mới dừng lại.
(2) Điều khiển robot gặp vật cản thì rẽ trái để tránh vật cản
Trong thực tế cần điều chỉnh chi tiết tham số về tốc độ, khoảng cách và thời gian để chương trình đạt được hiệu quả như ý muốn.
Khi sử dụng các biến nhớ trong lập trình cần chú ý đến các giá trị thay đổi của biến để chương trình lập trình được chính xác và tối ưu nhất.
Hot: 1000+ Đề thi cuối kì 2 file word cấu trúc mới 2026 Toán, Văn, Anh... lớp 1-12 (chỉ từ 60k). Tải ngay
CÂU HỎI HOT CÙNG CHỦ ĐỀ
Lời giải
Một robot hút bụi thường được tích hợp nhiều loại cảm biến như: Cảm biến hồng ngoại giúp robot không bị rơi khi ở gần cầu thang, cảm biến siêu âm giúp robot chống va đạp vào tường…
Cảm biến siêu âm vẫn hoạt động theo nguyên lý phát sóng siêu âm liên tục cho đến khi phát hiện vật cản trong khoảng đo đã được lập trình thì điều khiển robot hút bụi tránh vật cản.
Lời giải
Nguyên tắc hoạt động của cảm biến siêu âm:
Mỗi cảm biến siêu âm chỉ có tác dụng trong một khoảng cách nhất định. Gọi khoảng cách này là Max. Khi vật cản ở xa, vượt qua giới hạn Max, có thể coi hàm nhận tín hiệu cảm biến sẽ trả về giá trị Max. Cảm biến siêu âm dựa trên nguyên lý phát sóng và phản xạ sóng siêu âm.
Lệnh lập trình cảm biến siêu âm:
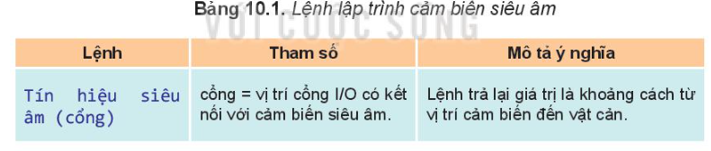
Câu lệnh lập trình cảm biến siêu âm luôn trả về giá trị là khoảng cách từ cảm biến siêu âm đến vật cản phía trước theo đơn vị centimet.
Để robot nhận được tín hiệu cảm biến siêu âm liên tục với thời gian thực chúng ta cần đưa lệnh điều khiển cảm biến siêu âm vào trong nhóm lệnh thứ hai, tức là nhóm lệnh lặp vô hạn trong chương trình.
Sơ đồ chung của việc xử lí thông tin cảm biến siêu âm của robot:
forever
if <nhận tín hiệu cảm biến siêu âm>
Xử lí tín hiệu cảm biến siêu âm
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.