












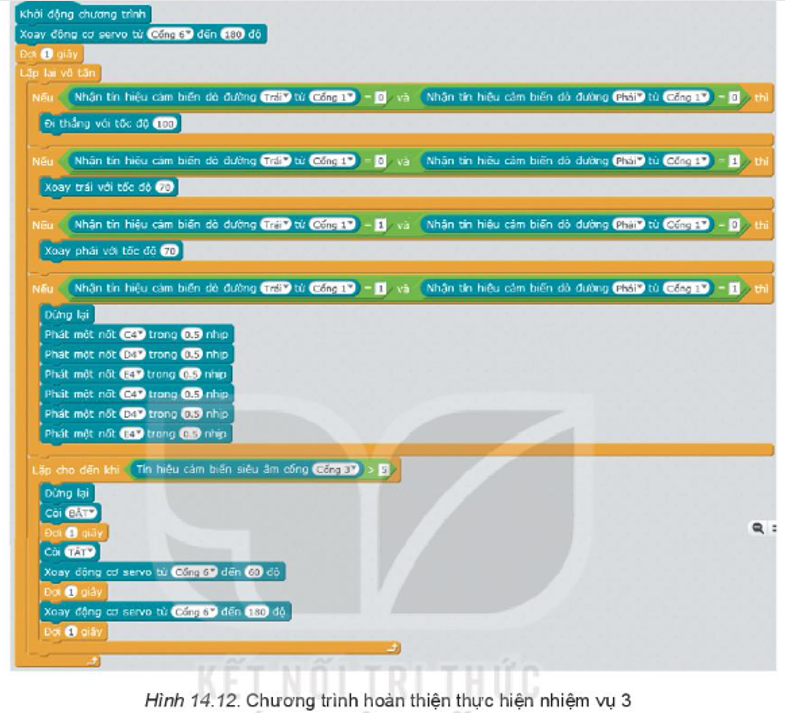
Em hãy hiệu chỉnh lại chương trình của nhiệm vụ 3 để robot dừng lại tại vị trí Kết thúc, phát các nốt nhạc theo thứ tự: Đô, Rê, Mi, Pha, Đô, Rê, Mi, Pha ở quãng 4 trong 1/2 nhịp và đổi màu đèn LED báo hiệu.
Em hãy hiệu chỉnh lại chương trình của nhiệm vụ 3 để robot dừng lại tại vị trí Kết thúc, phát các nốt nhạc theo thứ tự: Đô, Rê, Mi, Pha, Đô, Rê, Mi, Pha ở quãng 4 trong 1/2 nhịp và đổi màu đèn LED báo hiệu.
Quảng cáo
Trả lời:
Thêm câu lệnh phát nốt pha quãng 4 (F4) ở trường hợp dò đường thứ 4 và câu lệnh bật đèn LED với màu bất kì khi phát hiện vật cản.
Hot: 1000+ Đề thi cuối kì 2 file word cấu trúc mới 2026 Toán, Văn, Anh... lớp 1-12 (chỉ từ 60k). Tải ngay
CÂU HỎI HOT CÙNG CHỦ ĐỀ
Lời giải
Chuẩn bị: Sa bàn, khối hàng hóa, robot có gắn còi, động cơ, cảm biến dò đường, cảm biến siêu âm và cơ cấu vận chuyển hàng hóa.
Minh họa lập trình thực tế bằng phần mềm GaraBlock
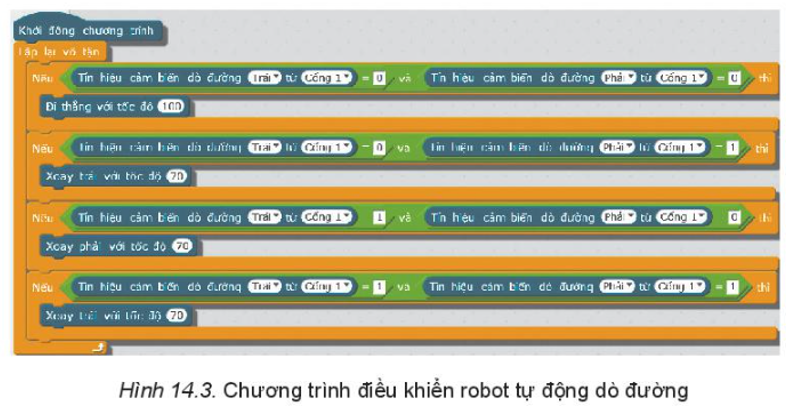
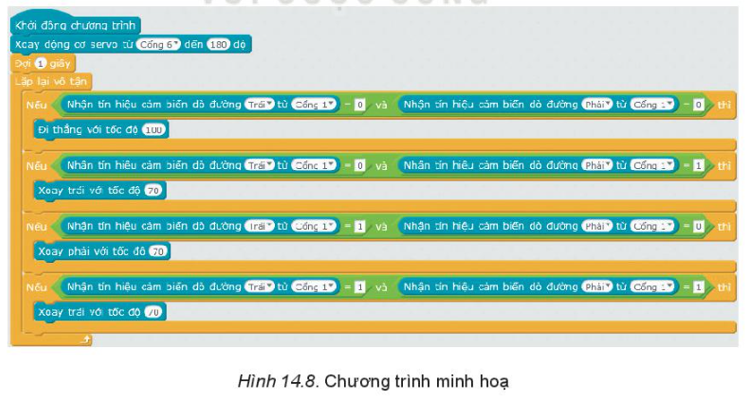
Bước 1. Sử dụng câu lệnh lập trình cảm biến dò đường hai mắt tương ứng với bốn trường hợp xử lý đã được học ở Bài 11 để robot có thể tự động nhận biết và di chuyển chính xác theo đường trên sa bàn (Hình 14.3)
Bước 2. Sử dụng câu lệnh lập trình cảm biến siêu âm để robot có thể phát hiện vật cản trên sa bàn. Ví dụ robot cần dừng lại nếu phát hiện vật cản trong khoảng 5cm. Sử dụng câu lệnh “Lặp cho đến khi”, robot dừng lại khi phát hiện vật cản phía trước cho đến khi điều kiện của câu lệnh “Lặp cho đến khi” là đúng, nghĩa là khoảng cách từ cảm biến siêu âm đến vật cản lớn hơn 5cm (Hình 14.4)

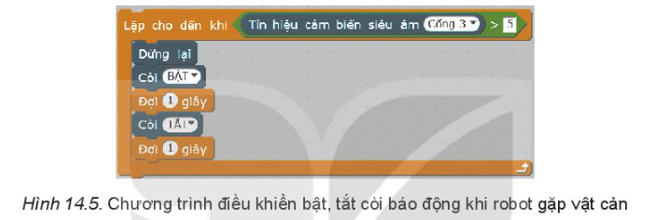
Bước 3. Sử dụng câu lệnh điều khiển còi báo động. Khi robot dừng lại thì bật còi trong một giây và tắt còi sau 1 giây (Hình 14.5)
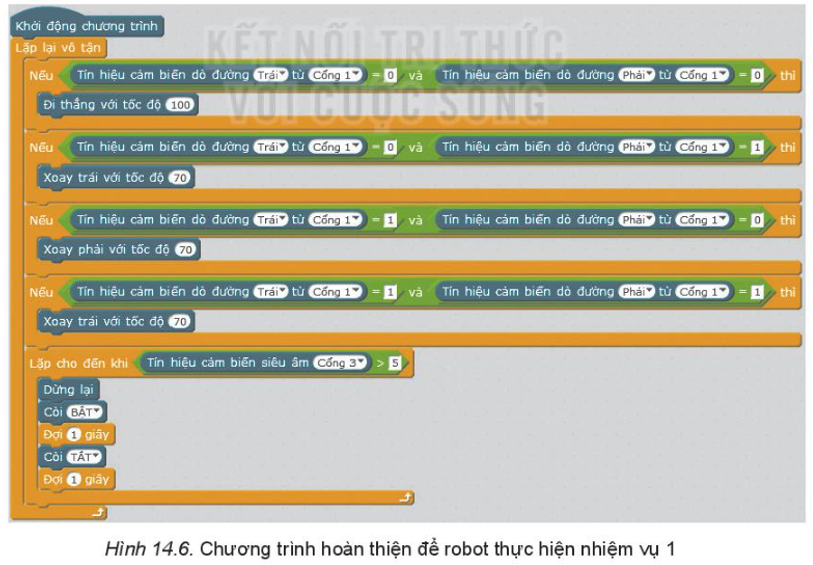
Bước 4. Chương trình thực hiện yêu cầu nhiệm vụ 1 hoàn chỉnh bằng cách kết hợp các chương trình ở các bước 1,2,3 như trong Hình 14.6
Bước 5. Kết nối robot với máy tính và nạp chương trình đã lập trình vào robot.
Bước 6. Sau khi nạp chương trình thành công, em đặt robot vào đường đã có trên sa bàn sao cho cả 2 mắt của cảm biến dò đường đều nằm trên đường màu đen. Sau đó bấm nút chuyển chế độ lập trình với máy tính (vòng đèn LED màu trắng) trên mạch điều khiển của robot và quan sát kết quả.
Lời giải
Chuẩn bị: Cần chuẩn bị robot như ở nhiệm vụ 1, gắn thêm động cơ servo, cơ cấu dọn dẹp vật cản.
Minh họa lập trình thực tế trên phần mềm GaraBlock
Bước 1. Sử dụng lại chương trình ở Hình 14.3 và bổ sung thêm câu lệnh xoay động cơ servo vào phía sau câu lệnh khởi động chương trình ở Hình 14.8
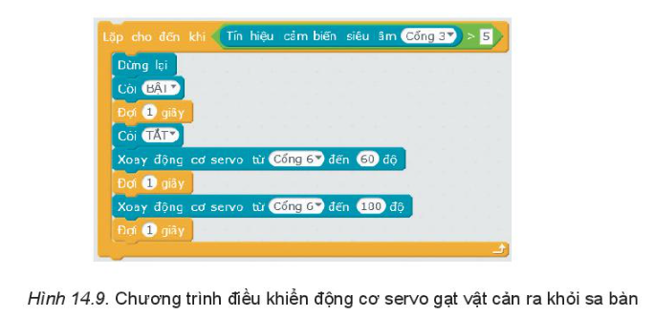
Bước 2. Sử dụng lại chương trình ở Hình 14.5 và bổ sung thêm câu lệnh xoay động cơ servo để gạt vật cản ra khỏi sa bàn sau khi có báo hiệu còi. Chú ý, có thể bỏ câu lệnh đợi 1 giây phía sau lệnh tắt còi ở Hình 14.5 để chương trình tối ưu hơn. Chương trình ví dụ như ở Hình 14.9
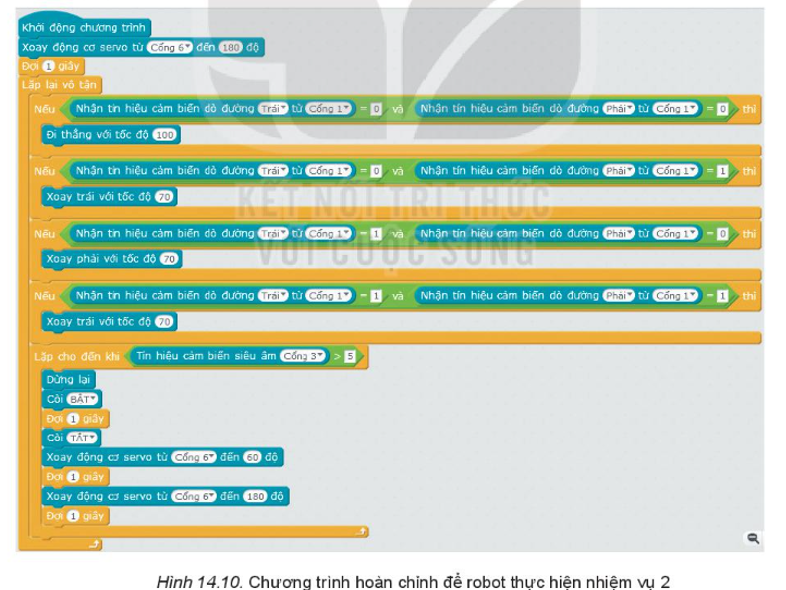
Bước 3. Kết hợp các chương trình ở các bước 1, 2 chúng ta có chương trình thực hiện yêu cầu nhiệm vụ 2 hoàn chỉnh ở Hình 14.10
Bước 4. Nạp chương trình vào robot, cho robot hoạt động trên sa bàn và quan sát kết quả.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.