












Chuyên đề Tin học 10 Bài 2. Bảng mạch điều khiển và cơ cấu chấp hành có đáp án
37 người thi tuần này 4.6 892 lượt thi 11 câu hỏi
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
🔥 Học sinh cũng đã học
Đề thi cuối kì 2 Tin học 10 Kết nối tri thức có đáp án - Đề 3
Đề thi cuối kì 2 Tin học 10 Kết nối tri thức có đáp án - Đề 2
Đề thi cuối kì 2 Tin học 10 Kết nối tri thức có đáp án - Đề 1
Đề thi giữa kì 1 Tin học 10 Cánh diều có đáp án - Đề 4
Đề thi giữa kì 1 Tin học 10 Cánh diều có đáp án - Đề 3
Đề thi giữa kì 1 Tin học 10 Cánh diều có đáp án - Đề 2
Đề thi giữa kì 1 Tin học 10 Cánh diều có đáp án - Đề 1
Đề thi giữa kì 1 Tin học 10 Kết nối tri thức có đáp án - Đề 4
Danh sách câu hỏi:

Lời giải
Vai trò của bảng mạch điện tử của robot: Thực hiện chức năng quan trọng nhất trong robot là xử lý tín hiệu ghi nhận được và đưa ra quyết định điều khiển robot. Vì thế bảng mạch điều khiển còn được coi là bộ não của robot.
Lời giải
Bảng mạch điều khiển của robot thực hiện chức năng quan trọng nhất trong robot là xử lý tín hiệu ghi nhận được và đưa ra quyết định điều khiển robot. Vì thế bảng mạch điều khiển còn được coi là bộ não của robot.
Lời giải
Bộ nhớ có thể có 3 dạng như sau:
- Bộ nhớ tạm (RAM) dùng cho việc tính toán dữ liệu.
- Bộ nhớ cố định (ROM) lưu trữ các chương trình (bao gồm PROM, EPROM, EEPROM)
- Bộ nhớ lưu dữ liệu (văn bản, hình ảnh, âm thanh, video, tệp tin, cấu hình) thường là một thẻ nhớ được gắn vào bảng mạch điều khiển qua một khe cắm mở rộng.
Lời giải
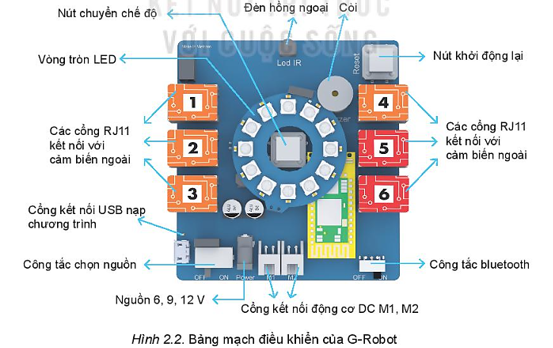
Bảng mạch điều khiển trong các robot nói chung đều được thiết kế dựa trên các nền tảng thiết kế mở. Nhờ vậy, có thể dễ dàng kết nối với các cảm biến hay các cơ cấu chấp hành và phụ kiện tiếp nhận điều khiển một cách dễ dàng, phù hợp với việc sử dụng trong môi trường giáo dục. Một trong các bảng mạch thuộc loại nêu trên đó là bảng mạch của robot G-Robot (Hình 2.2)
Lời giải
Có hai loại động cơ thường dùng cho robot là động cơ DC và động cơ Servo. Sự khác nhau của chúng:
- Động cơ DC: là loại động cơ điện 1 chiều dùng để thực hiện các chuyển động với vận tốc không đổi trong những khoảng thời gian xác định, ví dụ quay các bánh xe để robot di chuyển từ vị trí này sang vị trí khác.
- Động cơ Servo: là động cơ có khả năng phản hồi vị trí cuối cùng của trục quay. Đầu vào cho điều khiển của nó là tín hiệu (tương tự hoặc số) đại diện cho vị trí cuối cùng và hướng quan của trục quay. Trong robot động cơ servo thường dùng để điều khiển các cử động nâng, hạ đến vị trí thích hợp, ví dụ điều khiển cánh tay để di chuyển các đồ vật.
Lời giải
Vì robot cần 2 bánh xe tương ứng với 2 động cơ DC.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Xem tiếp với tài khoản VIP
Còn 5/11 câu hỏi, đáp án và lời giải chi tiết.
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.