












200+ câu Trắc nghiệm Điều khiển số có đáp án - Phần 7
21 người thi tuần này 4.6 697 lượt thi 29 câu hỏi
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
🔥 Học sinh cũng đã học
100 câu bài tập Những NLCB của chủ nghĩa Mác-Lênin I (có đáp án) - Phần 1
2000+ câu Trắc nghiệm tổng hợp Triết học có đáp án (Phần 6)
2000+ câu Trắc nghiệm tổng hợp Triết học có đáp án (Phần 5)
2000+ câu Trắc nghiệm tổng hợp Triết học có đáp án (Phần 4)
2000+ câu Trắc nghiệm tổng hợp Triết học có đáp án (Phần 3)
2000+ câu Trắc nghiệm tổng hợp Triết học có đáp án (Phần 2)
1000+ câu Trắc nghiệm Luật dân sự, hình sự, hành chính (có đáp án) - Phần 32
1000+ câu Trắc nghiệm Luật dân sự, hình sự, hành chính (có đáp án) - Phần 31
Danh sách câu hỏi:
Câu 1/29
A. \({W}_{PID}=1,0499\frac{z-0,905}{z-1}\)
B. \({W}_{PID}=1,0499\frac{z+0,905}{z-1}\)
C. \({W}_{PID}=1,0499\frac{z-0,905}{z+1}\)
D. \({W}_{PID}=1,0499\frac{z+0,905}{z+1}\)
Lời giải
Chọn đáp án A.
Câu 2/29
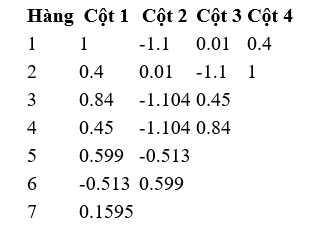
0.599
0.599
0.1292
0.1691
Lời giải
Chọn đáp án A.
Câu 3/29
Một tác động vào ta có thể chuyển trạng thái của hệ thống từ trạng thái ban đầu t₀ đến trạng thái cuối t₁ trong một thời gian hữu hạn
Một tác động ra ta có thể chuyển trạng thái của hệ thống từ trạng thái ban đầu t₀ đến trạng thái cuối t₁ trong một thời gian hữu hạn
Một tác động vào ta có thể chuyển trạng thái của hệ thống từ trạng thái ban đầu t₀ đến trạng thái cuối t₁ trong một thời gian vô hạn
Một tác động ra ta có thể chuyển trạng thái của hệ thống từ trạng thái ban đầu t₀ đến trạng thái cuối t₁ trong một thời gian vô hạn
Lời giải
Chọn đáp án A.
Câu 4/29
Các tọa độ đo được ở biến ra yᵢ của hệ, ta có thể khôi phục lại trạng thái x₁ trong khoảng thời gian hữu hạn
Các tọa độ đo được ở biến ra yᵢ của hệ, ta không thể khôi phục lại trạng thái x₁ trong khoảng thời gian hữu hạn
Các tọa độ đo được ở biến ra yᵢ của hệ, ta có thể khôi phục lại trạng thái x₁ trong khoảng thời gian vô hạn
Các tọa độ đo được ở biến ra yᵢ của hệ, ta không thể khôi phục lại trạng thái x₁ trong khoảng thời gian vô hạn
Lời giải
Chọn đáp án A.
Câu 5/29
Loại bỏ những điểm cực và điểm zero không mong muốn của hệ thống chưa hiệu chỉnh và thay vào đó là các cực và zero làm cho hệ thống có đáp ứng theo yêu cầu thiết kế
Không loại bỏ những điểm cực và điểm zero không mong muốn của hệ thống chưa hiệu chỉnh và thay vào đó là các cực và zero làm cho hệ thống có đáp ứng theo yêu cầu thiết kế
Loại bỏ những điểm cực và điểm zero không mong muốn của hệ thống hiệu chỉnh và thay vào đó là các cực và zero làm cho hệ thống có đáp ứng theo yêu cầu thiết kế
Tất cả A, B, C đều sai
Lời giải
Chọn đáp án A.
Câu 6/29
A. Hệ thống được gọi là quan sát được hoàn toàn khi và chỉ khi ma trận có hạng bằng n
B. Hệ thống được gọi là quan sát được hoàn toàn khi và chỉ khi ma trận có hạng bằng 2n
C. Hệ thống được gọi là quan sát được hoàn toàn khi và chỉ khi ma trận có hạng bằng n-1
D. Hệ thống được gọi là quan sát được hoàn toàn khi và chỉ khi ma trận có hạng bằng n-2
Lời giải
Chọn đáp án A.
Câu 7/29
A. Ma trận n × n
B. Ma trận (n-1) × n
C. Ma trận n × (n+1)
D. Ma trận n × (n-1)
Lời giải
Chọn đáp án A.
Câu 8/29
Hệ thống số được gọi là điều khiển được nếu ta tìm được vectơ điều khiển U(k) để chuyển hệ thống từ trạng thái ban đầu bất kỳ đến trạng thái cuối bất kỳ trong một khoảng thời gian giới hạn
Hệ thống số được gọi là điều khiển được nếu ta tìm được vectơ điều khiển U(k) để chuyển hệ thống từ trạng thái ban đầu bất kỳ đến trạng thái cuối bất kỳ trong một khoảng thời gian không giới hạn
Hệ thống số được gọi là không điều khiển được nếu ta tìm được vectơ điều khiển U(k) để chuyển hệ thống từ trạng thái ban đầu bất kỳ đến trạng thái cuối bất kỳ trong một khoảng thời gian giới hạn
Hệ thống số được gọi là điều khiển được nếu ta tìm được vectơ điều khiển U(k) để chuyển hệ thống từ trạng thái cuối bất kỳ đến trạng thái ban đầu bất kỳ trong một khoảng thời gian giới hạn
Lời giải
Chọn đáp án A.
Câu 9/29
Hệ thống số được gọi là quan sát được nếu theo các số liệu đã đo được ở đầu ra y(k) ta có thể xác định được trạng thái x(k) của nó
Hệ thống số được gọi là không quan sát được nếu theo các số liệu đã đo được ở đầu ra y(k) ta có thể xác định được trạng thái x(k) của nó
Hệ thống số được gọi là quan sát được nếu theo các số liệu đã đo được ở đầu ra y(k) ta không thể xác định được trạng thái x(k) của nó
Hệ thống số được gọi là quan sát được nếu theo các số liệu không đo được ở đầu ra y(k) ta có thể xác định được trạng thái x(k) của nó
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Câu 10/29
4
3
5
2
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Câu 11/29
(1 - W(z)) và W(z)
(1 - W(z))
W(z)
Cả A, B, C đều sai
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Câu 12/29
Vì khi thay đổi một lượng nhỏ các thông số của D(z) đều làm cho G(z) có thể có cực hay zero nằm trên hay ngoài vòng tròn đơn vị
Vì khi thay đổi một lượng lớn các thông số của D(z) đều làm cho G(z) có thể có cực hay zero nằm trên hay ngoài vòng tròn đơn vị
Vì khi thay đổi một lượng nhỏ các thông số của D(z) đều làm cho G(z) có thể có cực hay zero nằm trên hoặc ngoài vòng tròn đơn vị
Vì khi thay đổi một lượng lớn các thông số của D(z) sẽ không làm cho G(z) có thể có cực hay zero nằm trên hay ngoài vòng tròn đơn vị
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Câu 13/29
\(-j\frac{{ω}_{0}}{2}→j\frac{{ω}_{0}}{2}\)
\(-j\frac{{ω}_{0}}{3}→j\frac{{ω}_{0}}{3}\)
\(-j\frac{{ω}_{0}}{2}→j{ω}_{0}\)
\(-j{ω}_{0}→j\frac{{ω}_{0}}{2}\)
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Câu 14/29
Chuyển D(z) sang D(ω) thông qua phép biến đổi: \(z=\frac{1+\frac{T}{2}ω}{1-\frac{T}{2}ω}\)
Chuyển D(ω) sang D(z) thông qua phép biến đổi: \(z=\frac{1+\frac{T}{2}ω}{1-\frac{T}{2}ω}\)
Chuyển D(z) sang D(ω) thông qua phép biến đổi: \(z=\frac{1-\frac{T}{2}ω}{1+\frac{T}{2}ω}\)
Chuyển D(ω) sang D(z) thông qua phép biến đổi: \(z=\frac{1-\frac{T}{2}ω}{1+\frac{T}{2}ω}\)
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Câu 15/29
Ta có bù trễ pha
Ta có bù sớm pha
Ta có bù liên tục
Ta có bù không liên tục
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Câu 16/29
Ta có bù sớm pha
Ta có bù trễ pha
Ta có bù liên tục
Ta có bù không liên tục
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Câu 17/29
Không ổn định
Ổn định
Cả A, B đều sai
Cả A, B đều đúng
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Câu 18/29
Lân cận -π nên ω₀ và ωws cần phải nhỏ hơn -ωπ
Lân cận π nên ω₀ và ωws cần phải nhỏ hơn -ωπ
Lân cận -π nên ω₀ và ωws cần phải nhỏ hơn ωπ
Lân cận -π nên ω₀ và ωws cần phải lớn hơn -ωπ
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Câu 19/29
Xác định ωw₁ sao cho góc pha của G(jω) xấp xỉ -1800 + Φm+50. Tại tần số này có độ dự trữ pha là Φm
Xác định ωw₁ sao cho góc pha của G(jω) xấp xỉ 1800 + Φm+50. Tại tần số này có độ dự trữ pha là Φm
Xác định ωw₁ sao cho góc pha của G(jω) xấp xỉ 1800 - Φm. Tại tần số này có độ dự trữ pha là Φm
Xác định ωw₁ sao cho góc pha của G(jω) xấp xỉ 1800 + Φm. Tại tần số này có độ dự trữ pha là Φm
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Câu 20/29
Có độ sớm pha cần thiết nhưng không kiểm soát được biên độ
Có độ sớm pha cần thiết, kiểm soát được biên độ
Có độ sớm pha không cần thiết nhưng không kiểm soát được biên độ
Cả A, B, C đều đúng
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Xem tiếp với tài khoản VIP
Còn 21/29 câu hỏi, đáp án và lời giải chi tiết.
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.