












Đề thi thử đánh giá tư duy Đại học Bách khoa Hà Nội năm 2024 có đáp án (Đề 13)
30 người thi tuần này 4.6 1.6 K lượt thi 100 câu hỏi 150 phút
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
🔥 Học sinh cũng đã học
Đề tham khảo Đánh giá tư duy Đại học Bách khoa Hà Nội năm 2026 có đáp án (Đề 20)
Đề tham khảo Đánh giá tư duy Đại học Bách khoa Hà Nội năm 2026 có đáp án (Đề 19)
Đề tham khảo Đánh giá tư duy Đại học Bách khoa Hà Nội năm 2026 có đáp án (Đề 18)
Đề tham khảo Đánh giá tư duy Đại học Bách khoa Hà Nội năm 2026 có đáp án (Đề 17)
Đề tham khảo Đánh giá tư duy Đại học Bách khoa Hà Nội năm 2026 có đáp án (Đề 16)
Đề tham khảo Đánh giá tư duy Đại học Bách khoa Hà Nội năm 2026 có đáp án (Đề 15)
Đề thi Đánh giá tư duy Đại học Bách khoa Hà Nội năm 2026 có đáp án (Đề 14)
Đề thi Đánh giá tư duy Đại học Bách khoa Hà Nội năm 2026 có đáp án (Đề 13)
Danh sách câu hỏi:
Câu 1/100
Lời giải
Giải thích
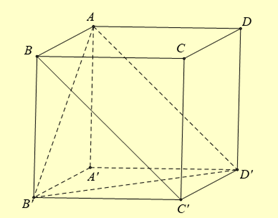
Dựng hình hộp \(ABCD.{A^\prime }{B^\prime }{C^\prime }{D^\prime }\). Ta có \(B{C^\prime }//A{D^\prime }\) và \({A^\prime }{B^\prime }{C^\prime }{D^\prime }\) là hình thoi.
Gọi \({A^\prime }{B^\prime } = x \Rightarrow {B^\prime }{D^\prime } = x\sqrt 3 \).
Vì \(B{C^\prime }//A{D^\prime }\) và \(A{B^\prime } \bot B{C^\prime } \Rightarrow A{B^\prime } \bot A{D^\prime }\) và \(A{B^{\prime 2}} = A{A^{\prime 2}} + {A^\prime }{B^{\prime 2}} = {x^2} + 3{a^2}\).
Vì \(\Delta A{A^\prime }{D^\prime } = \Delta A{A^\prime }{B^\prime } \Rightarrow A{B^\prime } = A{D^\prime } = {x^2} + 3{a^2}\).
Ta có: \({B^\prime }{D^{\prime 2}} = A{B^{\prime 2}} + A{D^{\prime 2}} = 2{x^2} + 6{a^2} = 3{x^2} \Leftrightarrow {x^2} = 6{a^2} \Leftrightarrow x = a\sqrt 6 \).
Khi đó,
Chọn D
![Cho hàm số \(f(x)\) liên tục trên \(\mathbb{R}\) và đồ thị như hình vẽ bên. Có bao nhiêu giá trị thực của \(m\) để hàm số \(g(x) = f\left( {{2^x} - 1} \right) + \dot f(m)\) có \({\max _{[0;1]}}|g(x)| = 3\)? (ảnh 1)](https://video.vietjack.com/upload2/quiz_source1/2024/10/blobid1-1729655896.png)
Lời giải
Giải thích
Đặt \(f(m) = a\), khi đó ta có
\({\max _{[0;1]}}|g(x)| = \max \left\{ {\left| {{{\max }_{[0;1]}}g(x)} \right|;\left| {{{\min }_{[0;1]}}g(x)} \right|} \right\}\)
Xét hàm số \(g(x) = f\left( {{2^x} - 1} \right) + a\), đặt \(t = {2^x} - 1 \Rightarrow t \in [0;1]\,\,\forall x \in [0;1]\)
Dựa vào đồ thị có: \(\left\{ {\begin{array}{*{20}{l}}{{{\max }_{[0;1]}}f(t) = 3}\\{{{\min }_{[0;1]}}f(t) = - 2}\end{array} \Rightarrow \left\{ {\begin{array}{*{20}{l}}{{{\max }_{[0;1]}}g(x) = 3 + a}\\{{{\min }_{[0;1]}}g(x) = - 2 + a}\end{array}} \right.} \right.\)
TH1. \(\left\{ {\begin{array}{*{20}{l}}{|3 + a| = 3}\\{|3 + a| > | - 2 + a|}\end{array} \Rightarrow a = 0 \Rightarrow f(m) = 0} \right.\) (4 nghiệm)
TH2. \(\left\{ {\begin{array}{*{20}{l}}{| - 2 + a| = 3}\\{| - 2 + a| > |3 + a|}\end{array} \Rightarrow a = - 1 \Rightarrow f(m) = - 1} \right.\) (4 nghiệm)
Vậy có tất cả 8 giá trị \(m\) thỏa mãn yêu cầu đề bài.
Chọn B
Câu 3/100
Lời giải
Giải thích
Ta có: \({2^x} - \left( {2 - {m^2}} \right){.2^{ - x}} > m\)
\( \Leftrightarrow {2^x} - \left( {2 - {m^2}} \right).\frac{1}{{{2^x}}} - m > 0{\rm{ }}\)
\( \Leftrightarrow {2^{2x}} - m{.2^x} - \left( {2 - {m^2}} \right) > 0\)
Đặt \(t = {2^x}(t > 0)\). Bất phương trình trở thành: \({t^2} - mt - \left( {2 - {m^2}} \right) > 0\,\,(*)\).
Bất phương trình đã cho nghiệm đúng với mọi \(x \in \mathbb{R}\)
\( \Leftrightarrow \) Bất phương trình (*) nghiệm đúng với mọi \(t > 0\).
TH1. Phương trình \({t^2} - mt - \left( {2 - {m^2}} \right) = 0\) vô nghiệm
\( \Leftrightarrow \Delta < 0 \Leftrightarrow {( - m)^2} + 4\left( {2 - {m^2}} \right) < 0 \Leftrightarrow \left[ {\begin{array}{*{20}{c}}{m > \frac{{2\sqrt 6 }}{3}}\\{m < - \frac{{2\sqrt 6 }}{3}}\end{array}} \right.\)
TH2. Phương trình \({t^2} - mt - \left( {2 - {m^2}} \right) = 0\) có hai không dương
\( \Leftrightarrow \left\{ {\begin{array}{*{20}{l}}{\Delta \ge 0}\\{S < 0}\\{P \ge 0}\end{array} \Leftrightarrow \left\{ {\begin{array}{*{20}{c}}{{{( - m)}^2} + 4\left( {2 - {m^2}} \right) \ge 0}\\{m < 0}\\{ - \left( {2 - {m^2}} \right) \ge 0}\end{array} \Leftrightarrow - \frac{{2\sqrt 6 }}{3} \le m \le - \sqrt 2 } \right.} \right.\)
Vậy \(\left[ {\begin{array}{*{20}{l}}{m > \frac{{2\sqrt 6 }}{3}}\\{m \le - \sqrt 2 }\end{array}} \right.\).
Chọn D

Lời giải
Đáp án
Tổng phần thực của hai số phức \({z_1}\) và \({z_2}\) bằng \(\frac{{27 - 8\sqrt 2 }}{8}\).
Giá trị nhỏ nhất của \(\left| {{z_1} - {z_2}} \right|\) bằng \(\frac{{21\sqrt 2 - 16}}{8}\).
Môđul của số phức \({z_1}\) bằng \(\frac{{3\sqrt 2 }}{8}\).
Giải thích
Gọi \(M(x;y)\) là điểm biểu diễn số phức \({z_1}\).
Khi đó \(|z - 1 - 2i{|^2} - |z + 1{|^2} = 1\)
\( \Leftrightarrow {(x - 1)^2} + {(y - 2)^2} - {(x + 1)^2} - {y^2} = 1 \Leftrightarrow 4x + 4y - 3 = 0.\)
\( \Rightarrow \) Tập hợp điểm biểu diễn số phức \({z_1}\) là đường thẳng \(\Delta :4x + 4y - 3 = 0\).
Gọi \(N(a;b)\) là điểm biểu diển số phức \({z_2}\). Khi đó \(|z - 3 - 3i| = 2 \Leftrightarrow {(a - 3)^2} + {(b - 3)^2} = 4\).
Hay tập hợp điểm \(N\) trong mặt phẳng Oxy là đường tròn \((C):{(x - 3)^2} + {(y - 3)^2} = 4\) có tâm \(I(3;3)\), bán kính \(R = 2\).
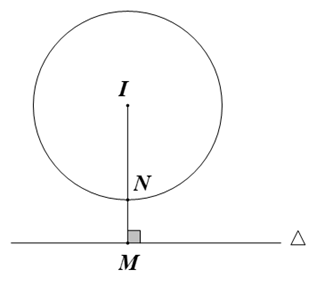
Ta có \(d(I;\Delta ) = \frac{{21\sqrt 2 }}{8} > R \Rightarrow (\Delta )\) không cắt đường tròn \((C)\).
Mặt khác, \(MN = \left| {{z_1} - {z_2}} \right|\). Khi đó, \(M{N_{\min }} \Leftrightarrow MN = d(I;\Delta ) - R = \frac{{21\sqrt 2 }}{8} - 2 = \frac{{21\sqrt 2 - 16}}{8}.\)
Đường thẳng MN đi qua điểm \(I(3;3)\) và vuông góc với \(\Delta \) có phương trình:
\((x - 3) - (y - 3) = 0 \Leftrightarrow x - y = 0.{\rm{ }}\)
Ta có: \(M = \Delta \cap MN \Rightarrow \) Tọa độ điểm \(M\) là nghiệm của hệ phương trình
\(\left\{ {\begin{array}{*{20}{l}}{x - y = 0}\\{4x + 4y - 3 = 0}\end{array} \Leftrightarrow x = y = \frac{3}{8} \Rightarrow \left| {{z_1}} \right| = \frac{{3\sqrt 2 }}{8}} \right.\)
Mặt khác, \(N = (C) \cap MN \Rightarrow \) Tọa độ điểm \(N\) là nghiệm của hệ phương trình
\(\left\{ {\begin{array}{*{20}{c}}{x - y = 0}\\{{{(x - 3)}^2} + {{(y - 3)}^2} = 4}\end{array} \Leftrightarrow \left[ {\begin{array}{*{20}{l}}{x = y = 3 + \sqrt 2 }\\{x = y = 3 - \sqrt 2 }\end{array}} \right.} \right.\)
Tính độ dài MN ta được \(N(3 + \sqrt 2 ;3 - \sqrt 2 )\) thỏa mãn \(M{N_{\min }}\).
Vậy \({x_M} + {x_N} = \frac{{27 - 8\sqrt 2 }}{8}\).
Lời giải
Đáp án
|
Phát biểu |
Đúng |
Sai |
|
Độ dốc mái tôn của nhà xưởng là 15%. |
X | |
|
Góc tạo bởi mặt phẳng mái và sàn là 17∘. (Kết quả làm tròn đến độ) |
X | |
|
Để tiết kiệm nguyên vật liệu, người ta chỉ có thể giảm độ dốc mái về mức tối thiểu. Khi đó, chiều cao của nhà xưởng giảm 0,8 mét. |
X |
Giải thích
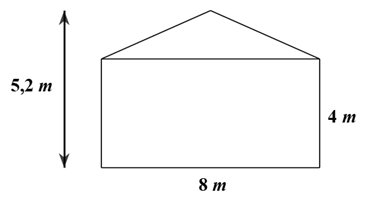
Độ dốc mái tôn của nhà xưởng là \(i = \frac{{5,2 - 4}}{{8:2}}.100\% = 30\% \).
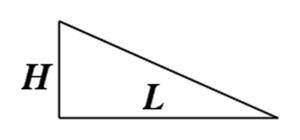
Gọi \(\alpha \) là góc tạo bởi mặt phẳng mái và sàn. Khi đó, \(\tan \alpha = \frac{H}{L} = 0,3 \Rightarrow \alpha \approx {17^^\circ }\).
Khi độ dốc mái giảm về mức tối thiểu thì \(i = \frac{{{H^\prime }}}{L}.100 \Rightarrow {H^\prime } = 0,4(m)\).
Suy ra chiều cao của nhà xưởng khi \(i = 10\% \) là 4,4 m. Vậy chiều cao của nhà xưởng giảm \(5,2 - 4,4 = 0,8(m)\).
Câu 6/100
Lời giải
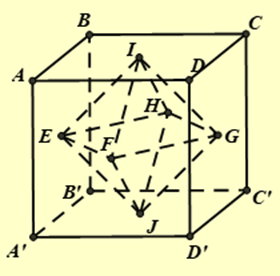
Giả sử hình lập phương \(ABCD.{A^\prime }{B^\prime }{C^\prime }{D^\prime }\) có cạnh bằng 1 ; tâm của các mặt là I, J, E, F, G, H như hình vē.
Ta có EFGH là hình thoi.
Thể tích khối bát diện đều là: \(V = \frac{1}{3}{S_{EFGH}}.IJ = \frac{1}{3}.\frac{1}{2}EG.FH.IJ = \frac{1}{6}\).
Chọn C
Câu 7/100
Lời giải
Ta có: \(A{C^2} = B{A^2} + B{C^2} \Leftrightarrow 2{a^2} = 2A{B^2} \Leftrightarrow A{B^2} = {a^2}\).
Chọn B
Lời giải
Đáp án
Cho \(n\) đường tròn đồng tâm \(O\). Biết rằng đường tròn trong cùng có bán kính \({r_1} = 2\), chu vi đường tròn \(\left( {O;{r_2}} \right)\) gấp 2 lần chu vi đường tròn \(\left( {O;{r_1}} \right); \ldots ;\) chu vi đường tròn \(\left( {O;{r_n}} \right)\) gấp 2 lần chu vi đường tròn \(\left( {O;{r_{n - 1}}} \right)\). Nếu chu vi đường tròn \(\left( {O;{r_n}} \right)\) gấp 128 lần chu vi đường tròn \(\left( {O;{r_1}} \right)\) thì bán kính đường tròn gần lớn nhất \({r_{n - 1}}\) bằng (1) __ 128 __ .
Giải thích
Nhận xét: \(\left\{ {\begin{array}{*{20}{c}}{2\pi {r_2} = 2.2\pi {r_1}}\\ \ldots \\{2\pi {r_n} = 2.2\pi {r_{n - 1}}}\end{array} \Leftrightarrow \left\{ {\begin{array}{*{20}{c}}{{r_2} = 2{r_1}}\\ \ldots \\{{r_n} = 2{r_{n - 1}}}\end{array}} \right.} \right.\).
Các bán kính \({r_1},{r_2}, \ldots ,{r_{n - 1}},{r_n}\) lập thành một cấp số nhân có số hạng đầu là \({r_1} = 2\) và công bội \(q = 2\).
Lại có: \(2\pi {r_n} = 128.2\pi {r_1} \Leftrightarrow {r_n} = 128{r_1} \Leftrightarrow {r_n} = {2^7}.{r_1} \Rightarrow {q^{n - 1}} = {2^7} \Rightarrow n = 8\).
Vậy bán kính đường tròn gần lớn nhất là \({r_{n - 1}} = {r_7} = {2^6}.{r_1} = {2^6}.2 = 128\).
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Câu 13/100
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.

Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.

Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.

Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Lời giải
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.
Xem tiếp với tài khoản VIP
Còn 92/100 câu hỏi, đáp án và lời giải chi tiết.
Bạn cần đăng ký gói VIP ( giá chỉ từ 250K ) để làm bài, xem đáp án và lời giải chi tiết không giới hạn.